OpenGL本身没有Camera定义,但是可以通过移动世界,给一个我们自己在动的错觉
观察空间
观察空间(View Space)也叫Camera Space或者Eye Space, 需要把世界空间转换成观察空间,也就是从相机的视角,观察世界空间的样子。
定义相机,我们需要它在世界空间中的位置、观察的方向、一个指向它右侧的向量以及一个指向它上方的向量。也就是以相机位置为原点的一个坐标系。
- 正的 z 轴 通常指向相机的背后,即从相机出发,指向远离场景的方向。
- 负的 z 轴 通常指向相机的前方,即场景中的物体是沿着负 z 轴从相机的视角被观察到的。
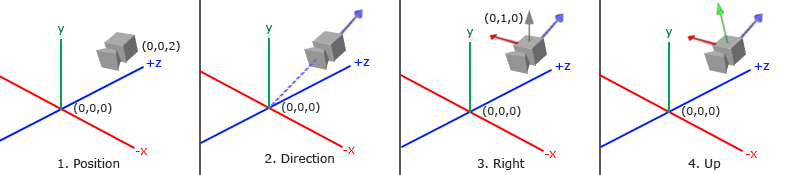
相机位置
如图,在世界空间定义相机的位置如下:
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, 2.0f);
相机方向Z
尽管相机指向z的负方向,但是作为View Space我们希望坐标轴指向为正
让相机指向世界空间原点,根据向量相减的几何意义,得到一新的向量,新的向量由被减数(target)指向减数(pos),也就是我们想要的z的方向。
glm::vec3 cameraTarget = glm::vec3(0.0f, 0.0f, 0.0f);
glm::vec3 cameraDirection = glm::normalize(cameraPos - cameraTarget);
相机右轴X
首先在世界空间定义个向上的单位向量, 然后将该向量与相机方向做叉乘, 会得到一个垂直于单位向量和相机方向的新向量,根据右手定则,新的向量即是我们想要的View Space的x轴
glm::vec3 up = glm::vec3(0.0f, 1.0f, 0.0f);
glm::vec3 cameraRight = glm::normalize(glm::cross(up, cameraDirection));
有了x轴和z轴, 那么z轴于x轴,就是我们想要的y轴
相机上轴Y
glm::vec3 cameraUp = glm::cross(cameraDirection, cameraRight);
注视目标
矩阵的好处是,如果有3个两两垂直(或非线性)的轴定义一个坐标空间,可以用这三个轴外加一个平移向量来创建一个矩阵。并且用这个矩阵乘以任何向量,将其转换空间。
$ LookAt = \begin{bmatrix} \color{red}{R_x} & \color{red}{R_y} & \color{red}{R_z} & 0 \\ \color{green}{U_x} & \color{green}{U_y} & \color{green}{U_z} & 0 \\ \color{blue}{D_x} & \color{blue}{D_y} & \color{blue}{D_z} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & 0 & -\color{purple}{P_x} \\ 0 & 1 & 0 & -\color{purple}{P_y} \\ 0 & 0 & 1 & -\color{purple}{P_z} \\ 0 & 0 & 0 & 1 \end{bmatrix} $
R为相机右轴,U为相机上轴, D为相机方向, P位相机位置。
注意,左边是旋转矩阵,右边是平移矩阵
GLM已经做了这项任务,我们只需要传入相机坐标P, Target坐标, 世界空间的向上坐标
glm::mat4 view;
view = glm::lookAt(glm::vec3(0.0f, 0.0f, 2.0f),
glm::vec3(0.0f, 0.0f, 0.0f),
glm::vec3(0.0f, 1.0f, 0.0f));
定点环绕
用三角学创建一个圆圈,让相机的位置圆圈上旋转,始终看向世界空间的原点
const float radius = 10.0f;
float camX = sin(glfwGetTime()) * radius;
float camZ = cos(glfwGetTime()) * radius;
glm::mat4 view;
view = glm::lookAt(glm::vec3(camX, 0.0, camZ), glm::vec3(0.0, 0.0, 0.0), glm::vec3(0.0, 1.0, 0.0));
自由移动
定义相机坐标Pos, Front坐标, 世界空间的向上坐标如下:
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, 3.0f);
glm::vec3 cameraFront = glm::vec3(0.0f, 0.0f, -1.0f);
glm::vec3 cameraUp = glm::vec3(0.0f, 1.0f, 0.0f);
// cameraPos + cameraFront 是动态计算相机的观察目标点,适用于移动情况
view = glm::lookAt(cameraPos, cameraPos + cameraFront, cameraUp);
注意第二个是Front坐标,也就是相机面向的方向, 这样确保无论怎样移动,始终看向同一个方向。
键盘输入
前后移动比较简单,在z轴上加上一定的delta = cameraSpeed * cameraTarget
左右移动则要用到向量叉乘, 右手定则, 左右向量乘数对调,方向相反
static void processArrowKeys(GLFWwindow *window, glm::vec3& cameraPos, glm::vec3& cameraFront, glm::vec3& cameraUp, float deltaTime)
{
processKeyInput(window);
const float cameraSpeed = 2.5f * deltaTime; // adjust accordingly
if (glfwGetKey(window, GLFW_KEY_W) == GLFW_PRESS or glfwGetKey(window, GLFW_KEY_UP) == GLFW_PRESS)
cameraPos += glm::normalize(cameraFront) * cameraSpeed;
if (glfwGetKey(window, GLFW_KEY_S) == GLFW_PRESS or glfwGetKey(window, GLFW_KEY_DOWN) == GLFW_PRESS)
cameraPos -= glm::normalize(cameraFront) * cameraSpeed;
if (glfwGetKey(window, GLFW_KEY_A) == GLFW_PRESS or glfwGetKey(window, GLFW_KEY_LEFT) == GLFW_PRESS)
cameraPos -= glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;
if (glfwGetKey(window, GLFW_KEY_D) == GLFW_PRESS or glfwGetKey(window, GLFW_KEY_RIGHT) == GLFW_PRESS)
cameraPos += glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;
}
移动速度
当前使用的是常量移动速度,一个问题是,速度快的机器帧率高,即每秒render loop执行的快,视角移动也相应的快,相反慢的机器就移动就慢
为了解决这个问题,应用或游戏通常会保存一个deltatime变量,用来保存上一帧花费了多长时间。
假设一个设备,桢率=60fps, 也就是$deltatime=\frac{1}{60}$, 他就是的速度倍速就慢一些
假设一个设备,桢率=30fps, 也就是$deltatime=\frac{2}{60}$, 他就是的速度倍速就快一倍
float deltaTime = 0.0f; // Time between current frame and last frame
float lastFrame = 0.0f; // Time of last frame
float currentFrame = glfwGetTime();
deltaTime = currentFrame - lastFrame;
lastFrame = currentFrame;
const float cameraSpeed = 2.5f * deltaTime;
自由视角
之前相机的视角是固定的,cameraFront是一个固定值,可以通过鼠标输入改变。
欧拉角
欧拉角(Euler Angle)是可以表示3D空间中任何旋转的3个值, 一共有3种欧拉角:
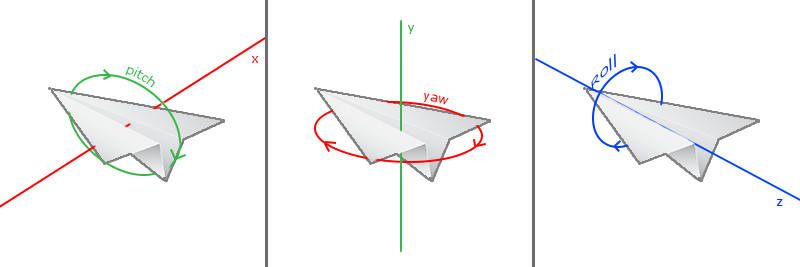
俯仰角(Pitch)是描述我们如何往上或往下看的角。偏航角(Yaw)表示我们往左和往右看的程度。滚转角(Roll)代表我们如何翻滚摄像机,通常在太空飞船的摄像机中使用。
每个欧拉角都有一个值来表示,把三个角结合起来我们就能够计算3D空间中任何的旋转向量了。
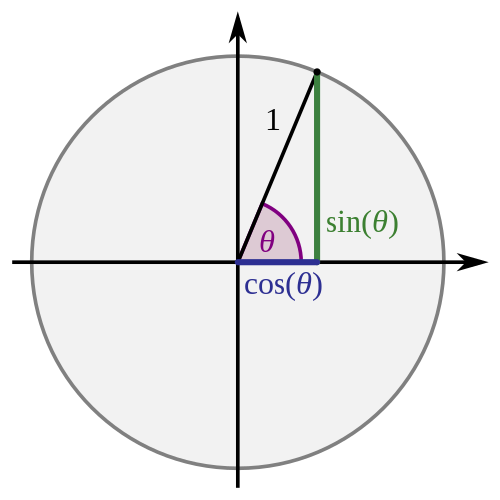
对于相机来说,我们只关心前两个(鼠标做不到旋转角), 假设相方向向量如下:
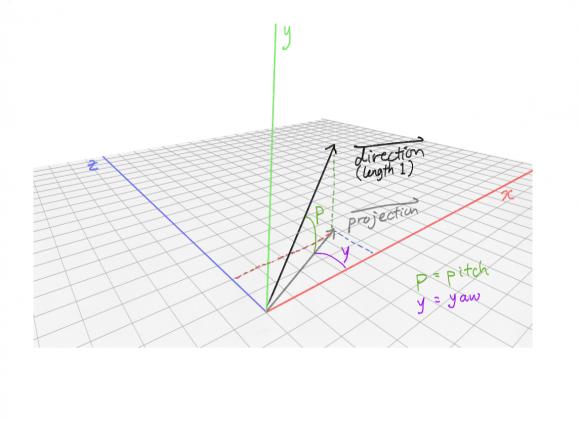
向量长度1, 俯仰角为p, 偏航角为y。
获得相机方向各个坐标轴分量,需要三角学。
$角p对边=斜边\times\sin(p)$
$角p邻边=斜边\times\cos(p)$
由于斜边=1, 相机方向向量计算如下:
glm::vec3 direction;
direction.x = cos(glm::radians(yaw)) * cos(glm::radians(pitch));
direction.y = sin(glm::radians(pitch));
direction.z = sin(glm::radians(yaw)) * cos(glm::radians(pitch));
我们的相机是应该看向z轴负方向的, 但如果偏航角(Yaw)为0,相机就会看向x轴方向。
为了修正这个,yaw的初始值应该为-90;
yaw = -90.0f;
鼠标输入
俯仰角(Pitch)和偏航角(Yaw)是从鼠标(手柄或遥感)两个帧的差值获取的。水平移动决定偏航角(Yaw), 垂直移动决定俯仰角(Pitch)。
首先定义callback函数, 需要保存记录上一鼠标的值, 所以定一个struct
struct MouseCapture {
double lastX;
double lastY;
double x;
double y;
};
static MouseCapture mouseCapture;
static void mouseCaptureCallback(GLFWwindow* window, double xpos, double ypos) {
struct MouseCapture position = {mouseCapture.x, mouseCapture.y, xpos, ypos};
mouseCapture = position;
}
然后设置GLFW隐藏并捕光标动作。捕捉意味着光标应该停留在窗口中(除非程序失去焦点或者退出)
// - GLFW_CURSOR_NORMAL 标准模式 (默认) - 鼠标光标可见,可以自由移动
// 适用于普通 GUI 应用、2D 游戏等场景
//
// - GLFW_CURSOR_HIDDEN 隐藏模式 - 鼠标光标不可见,但仍然可以自由移动
// 适用于游戏中隐藏鼠标光标(如狙击镜瞄准模式)
//
// - GLFW_CURSOR_DISABLED 禁用模式 (FPS 模式) - 鼠标光标不可见,并锁定在窗口中心
// 适用于第一人称相机控制,让鼠标输入直接影响视角旋转
glfwSetInputMode(window, GLFW_CURSOR, GLFW_CURSOR_DISABLED);
glfwSetCursorPosCallback(window, mouseCaptureCallback);
相机空间
在屏幕坐标系中:
- 鼠标的 Y 轴 是从 上到下 增大的(向下为正)。
- 鼠标的 X 轴 是从 左到右 增大的(向右为正)。
但在数学坐标系(OpenGL 3D 空间)中:
- 我们希望 Y 轴是从下到上增大的(向上为正)。
- 轴仍然是 左到右增大,符合 OpenGL 右手坐标系的规则。
首先获得鼠标输入增量, 我们希望获的y轴·,是底部到顶部是增大的,所以鼠标捕获的值需要取负值。
然后将结果乘以敏感度(sensitivity)系数
float xoffset = capture.x - capture.lastX;
float yoffset = capture.lastY - capture.y; // reversed since y-coordinates range from bottom to top
const float sensitivity = 0.1f;
xoffset *= sensitivity;
yoffset *= sensitivity;
对于俯仰角我们要做一个限制,这样摄像机就不会发生奇怪的移动了(也会避免一些奇怪的问题)。
对于俯仰角,要让用户不能看向高于89度的地方(在90度时视角会发生逆转,所以我们把89度作为极限。
同样也不允许小于-89度。这样能够保证用户只能看到天空或脚下,但是不能超越这个限制。
if(pitch > 89.0f) pitch = 89.0f;
if(pitch < -89.0f) pitch = -89.0f;
最后将角度增量, 加到已有的变量上, 计算出cameraFront。
yaw += xoffset;
pitch += yoffset;
glm::vec3 direction;
direction.x = cos(glm::radians(yaw)) * cos(glm::radians(pitch));
direction.y = sin(glm::radians(pitch));
direction.z = sin(glm::radians(yaw)) * cos(glm::radians(pitch));
cameraFront = glm::normalize(direction);
注意当鼠标被捕获时,第一个回调数值是鼠标进入窗口时的坐标,因为差值需要两个值相减,所以获取差值需要过滤掉第一次回调的结果。
缩放
滚轮输入
注册回调函数
glfwSetScrollCallback(window, scroll_callback);
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset)
{
...
}
缩放视角
限制fov在[0.0, 45.0]范围内, 当fov变小时,根据视觉投影的结果,会有画面放大的效果
fov -= (float)yoffset;
if (fov < 1.0f)
fov = 1.0f;
if (fov > 45.0f)
fov = 45.0f;
绘制
// render loop
glm::mat4 model = glm::mat4(1.0f);
model = glm::translate(model, cube_positions[i]);
model = glm::rotate(model, (float)glfwGetTime() * glm::radians(50.0f), glm::vec3(0.5f, 1.0f, 0.0f));
glm::mat4 view = glm::lookAt(cameraPos, cameraPos + cameraFront, cameraUp);
glm::mat4 projection = glm::perspective(glm::radians(fov), 800.0f / 600.0f, 0.1f, 100.0f);
glUniformMatrix4fv(glGetUniformLocation(shaderProgram, "model"), 1, GL_FALSE, glm::value_ptr(model));
glUniformMatrix4fv(glGetUniformLocation(shaderProgram, "view"), 1, GL_FALSE, glm::value_ptr(view));
glUniformMatrix4fv(glGetUniformLocation(shaderProgram, "projection"), 1, GL_FALSE, glm::value_ptr(projection));